
Jaco Robotic Arm - ROS/Unity Simulation
Published:
Jaco Robotic Arm – Pick & Place with Computer Vision 🤖
Internship Project @ Athena RC
We (in collaboration with Giannakopoulou Lamprini) developed a simulation pipeline for a Kinova Jaco 6‑DOF robotic arm, integrating Unity and ROS with computer vision to perform real-world tasks like leaf disease detection and garbage sorting.
🎯 What We Did
- Unity + ROS Integration
- Utilized Unity and ROS Noetic/Melodic to simulate and control the robotic arm
- Employed Gazebo and RViz for physics-based motion planning
- Three Interactive Scenarios in Unity
- Basic Pick & Place – A simple demo to move objects using the robotic arm
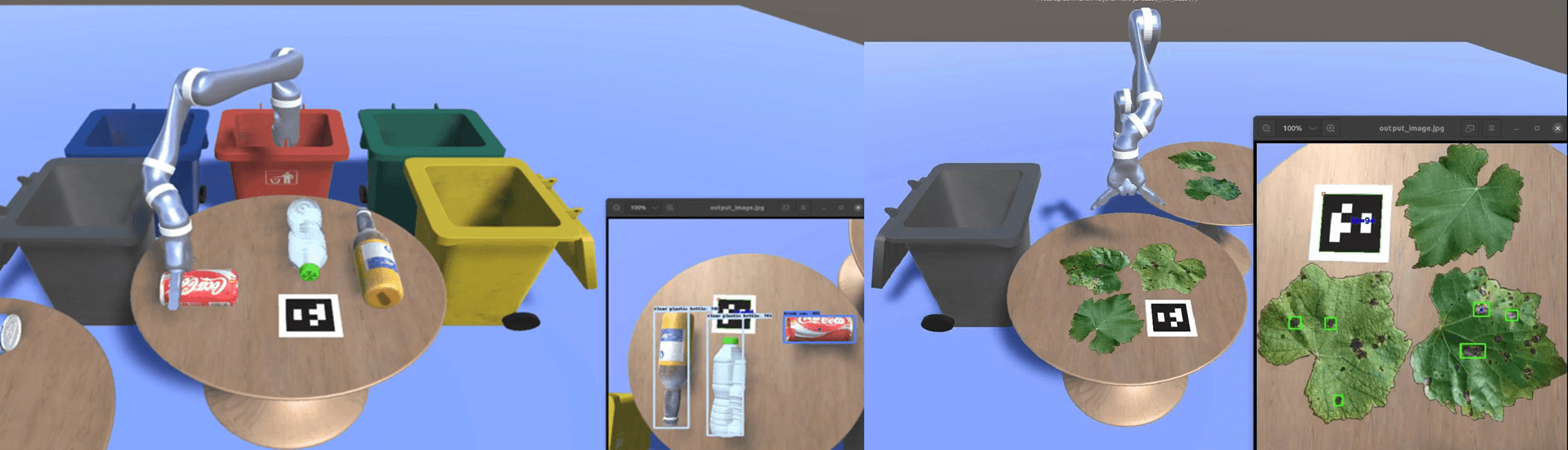
- Leaf Disease Detection – Detects grape leaves with disease using a YOLOv4 model and sorts them accordingly
- Garbage Sorting – Uses object detection, SSD MobileNetV2, to classify and sort waste into categories: plastic, metal, paper, glass, unknown
🚀 Impact & Takeaways
This project demonstrates a complete pipeline for robotic perception and manipulation.
Key outcomes:
- Real-time computer vision in robotics
- Integration of Unity and ROS for simulation
- Real-world use cases: agriculture and sustainability
🎥 Demo Videos & Slides
- Leaf Disease Detection Video
- Garbage Sorting Simulation Video
- Garbage Sorting Real-Time Demo
- Project Slides