Jaco Robotic Arm - ROS/Unity Simulation
Published:
We developed a simulation pipeline for a Kinova Jaco 6‑DOF robotic arm, integrating Unity and ROS with computer vision to perform real-world tasks like leaf disease detection and garbage sorting.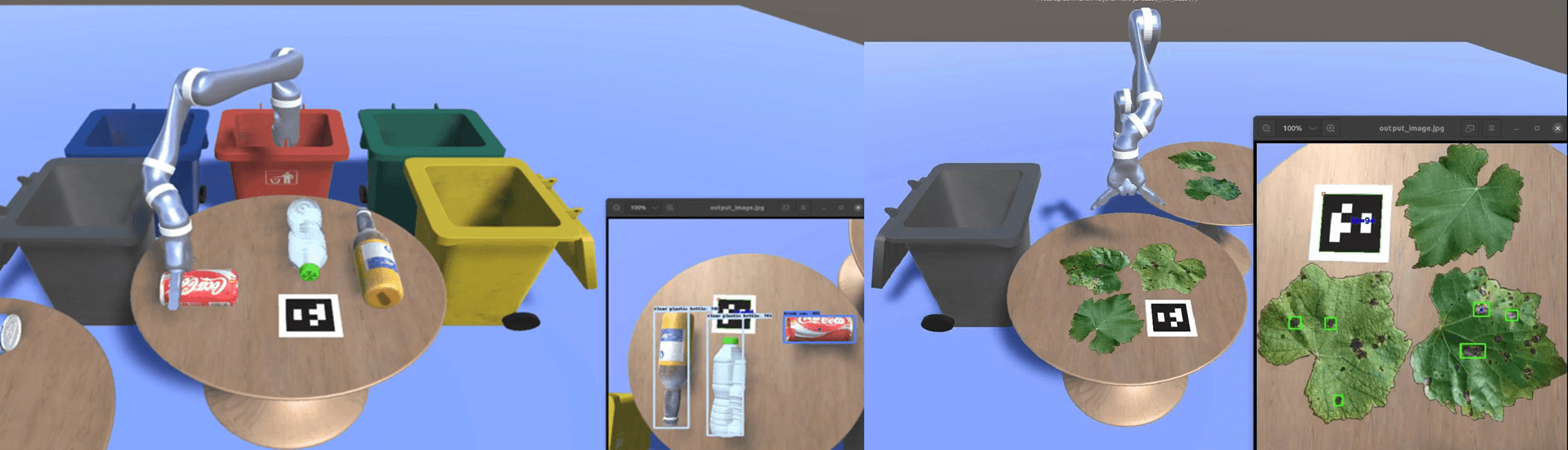

Published:
We developed a simulation pipeline for a Kinova Jaco 6‑DOF robotic arm, integrating Unity and ROS with computer vision to perform real-world tasks like leaf disease detection and garbage sorting.
Published:
We participated in the Continual Learning Challenge 2024, aiming at pushing the boundaries of continual learning techniques, addressing catastrophic forgetting, and improving model adaptation on sequential vision tasks. 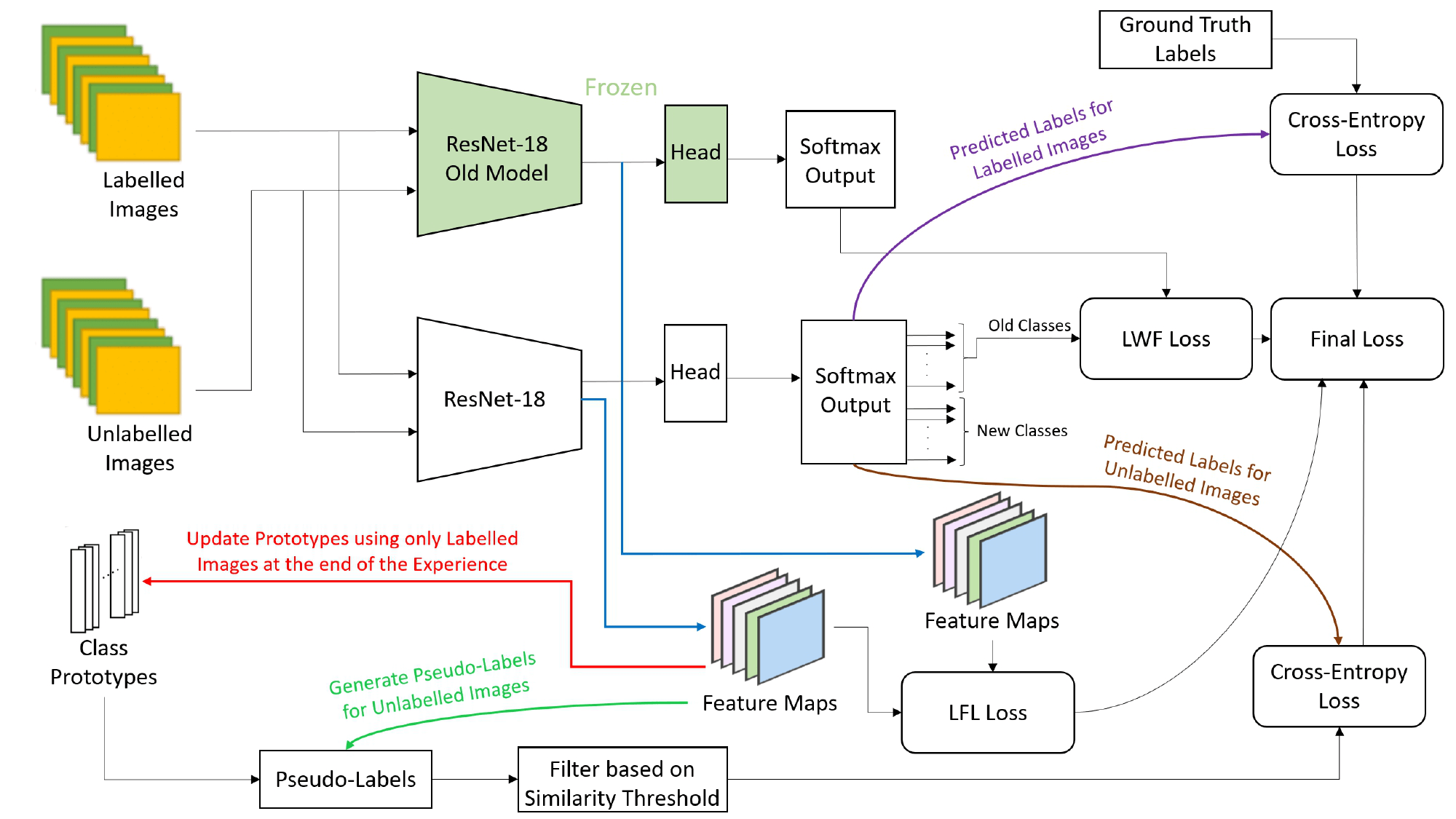
Published:
This project introduces a continual test-time adaptation method designed to handle domain shifts in real-world scenarios by adapting models on the fly without access to source data or retraining (Online Adaptation). 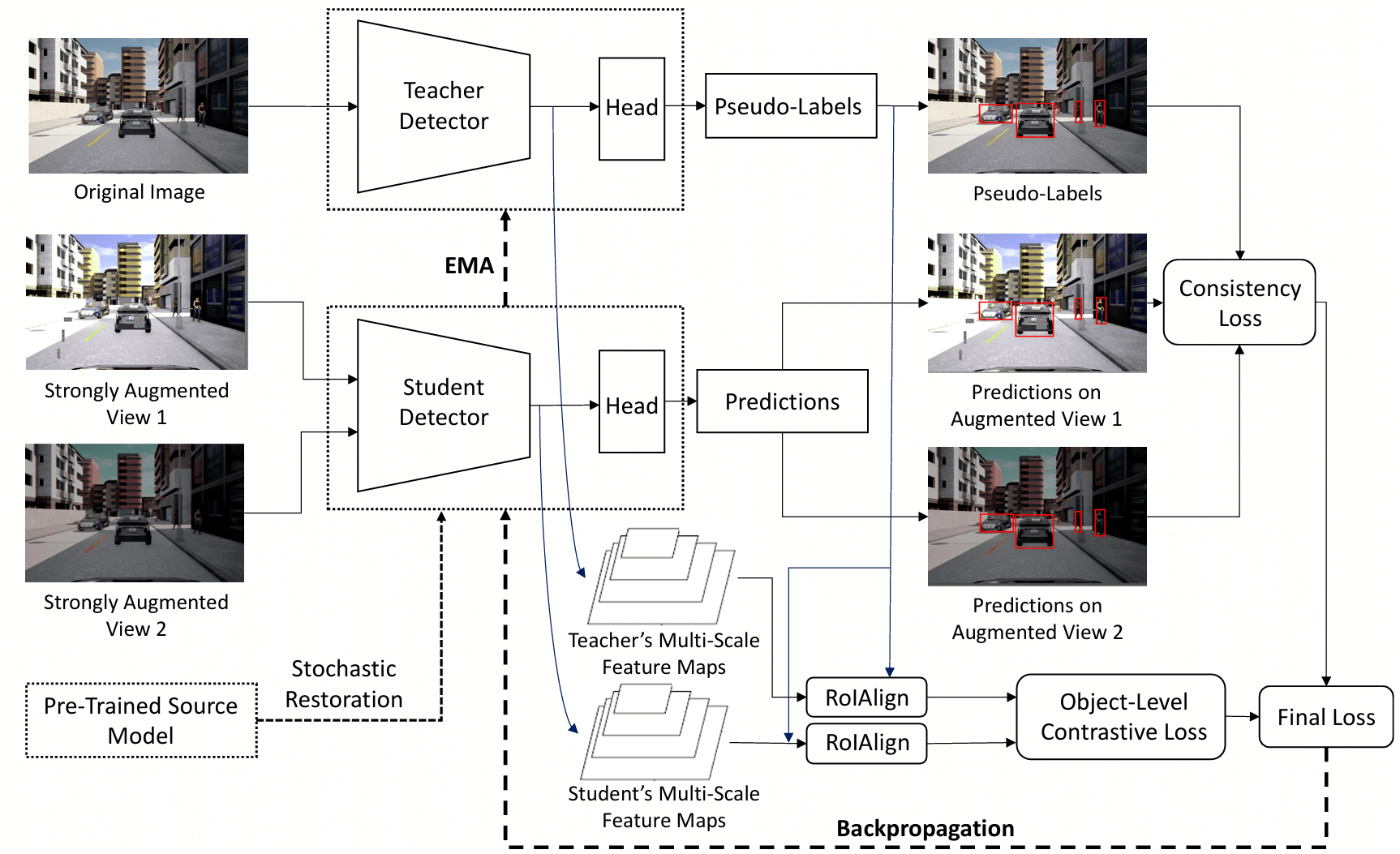
Published in Democritus University of Thrace (DUTh), July 2024 | Download Paper | View Slides
Published in Hellenic Conference on Artificial Intelligence (SETN), December 2024 | Download Paper | View Slides
Published in arXiv, March 2025 | Download Paper | View Slides | Watch Video
Published in IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), July 2025 | Download Paper | Watch Video
Published:
Published:
Published:
Undergraduate course, University 1, Department, January 2014
Workshop, University 1, Department, January 2015